MARS Rocket Avionics
Custom flight controller and avionics system for high-powered rocketry, developed with the TMU MARS Rocket Team.
Overview
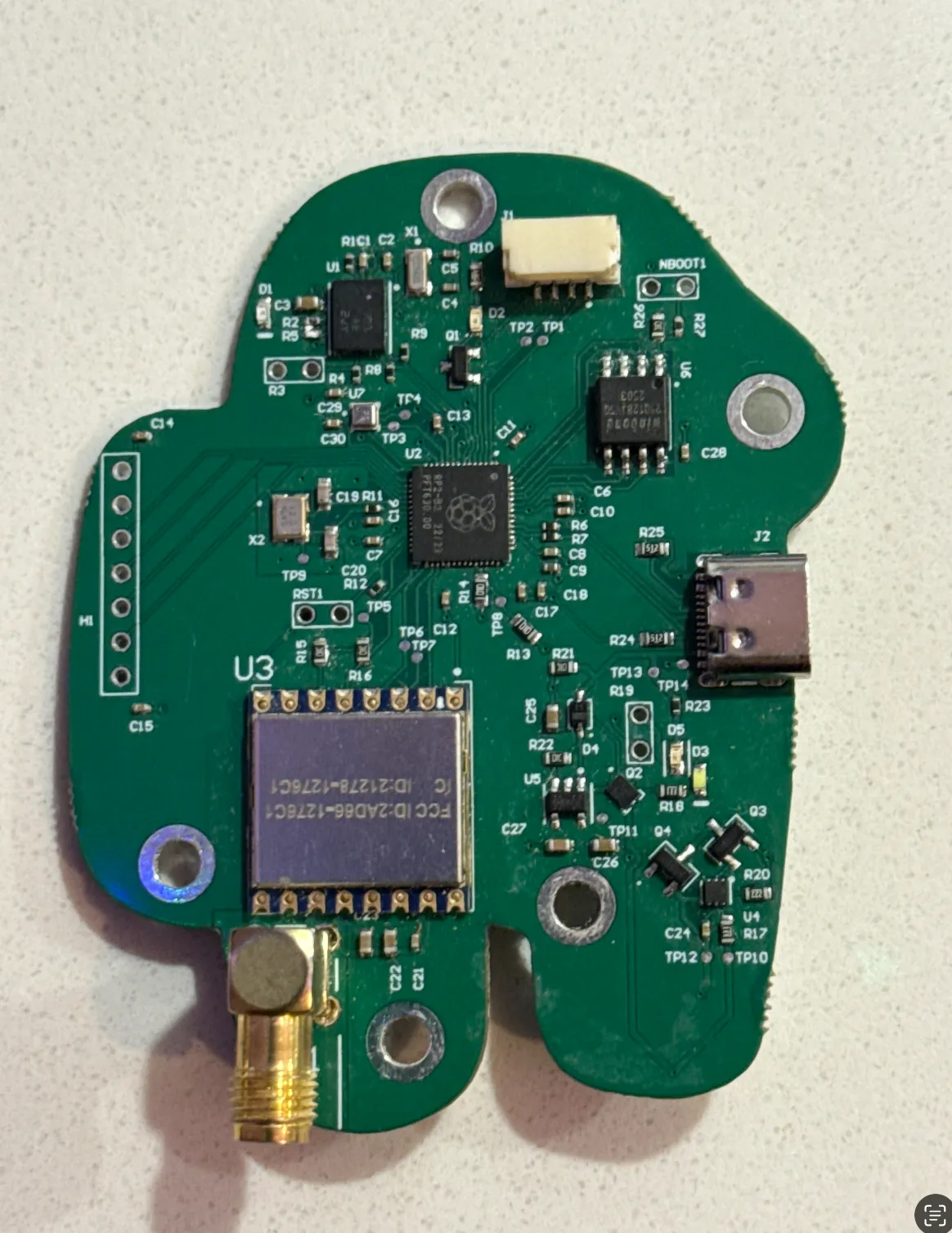
Designed and implemented the avionics system for the university rocketry team. The core component was a custom flight controller (affectionately named the "Among Us" board) responsible for state estimation, data logging, and parachute deployment.
Electrical Design
The flight controller featured a custom PCB design integrating a microcontroller, IMU sensors, GPS module, and telemetry transceiver. Key challenges included power management—specifically preventing board damage when LiPo batteries were plugged in while shorted—and ensuring signal integrity for the GPS and telemetry modules. We iterated on the design to improve robustness against electrical faults.
Software Architecture
The firmware was developed to handle high-speed sensor polling and real-time state estimation. It included drivers for the IMU and GPS, as well as a robust state machine for detecting launch, apogee, and landing events. We faced and overcame issues with IMU accuracy and GPS reliability through advanced filtering and sensor fusion algorithms.
Gallery

Results & Achievements
The system was successfully flown in over 30 launches. We overcame significant challenges including telemetry packet drops in hilly terrain and initial hardware failures. Through iterative testing and software filtering, we achieved reliable recovery deployment and data recovery.